深度学习卷积神经网络(斯坦福2016 CS231n)笔记
CS231n Lecture 3 第三个视频笔记
SVM && Softmax && Learning Rates && Gradient Check && Mini-batch Gradient Descent
SVM loss function
def L_i_vector(x,y,W):
scores = W.dot(x)
margins = np.maximum(0,scores - scores[y]+1)
margins[y] = 0 #只是为了不等于1
loss_i = np.sum(margins)
return loss_iRegularization motivation
Take all X into account
lambda.dot(R(W))R(w)可能情况
L2 regularization: R(W) = square(W)
L1 regularization: R(W) = abs(W) — feature selection
Elastic net(L1+L2):R(W) = \beta.dot(W.dot(W)) + abs(W)
Max norm regularization
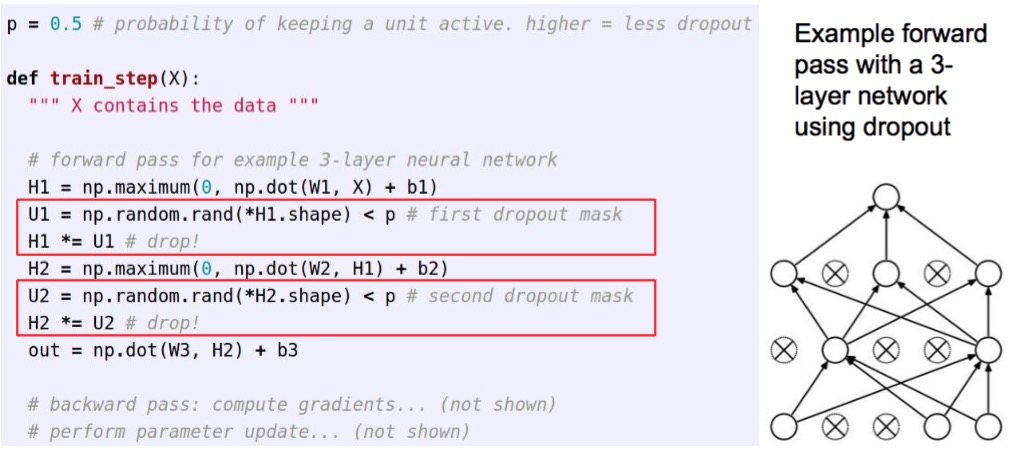
Dropout
Softmax Classifier(Multinomial Logistic Regression)
scores = unnormalized log probabilities of the classes.
maximize the log likelihood or minimize the negative log likelihood
Loss: Li = -log(P(Y=yi|X=xi))
Softmax vs. SVM
if changing its score slightly,SVM doesn’t care.Softmax will change a lot.
CS231n Lecture 4 第四个视频 BP & NN
Chain rule
calc $ f(x,y,z) = (x+y)z $ to understand activations of backprop.
Another large example:
Jacobian Matrix Diagonal Sparsity
NN
超厉害的11行代码实现两层神经网络 Basic Python Network
X = np.array([ [0,0,1],[0,1,1],[1,0,1],[1,1,1] ])
y = np.array([[0,1,1,0]]).T
syn0 = 2*np.random.random((3,4)) - 1 #Weight Synapse 突触
syn1 = 2*np.random.random((4,1)) - 1
for j in xrange(60000):
l1 = 1/(1+np.exp(-(np.dot(X,syn0))))
l2 = 1/(1+np.exp(-(np.dot(l1,syn1))))
l2_delta = (y - l2)*(l2*(1-l2))
l1_delta = l2_delta.dot(syn1.T) * (l1 * (1-l1))
syn1 += l1.T.dot(l2_delta)
syn0 += X.T.dot(l1_delta)Cell body : sum && bias
Activation funtion
sigmoid
tanh(x):$ tanh(x) $
ReLU:$max(0,x)$ make your classifier more faster, use as default
Leaky ReLU: $max(0.1 x,x) $
Maxout: $ max(w_1^T x +b_1,w_2^T x +b_2) $
ELU:$ f(x) = \left{\begin{array}{c}
x
\alpha (e^x-1)
\end{array}
\right.
$
NN
数layers时,input layer不算
非常有意思的演示,将空间的转变演示出来了
More always better~but you need avoid overfiting
不同的layer不同的function,一般没人这么做
Lecture 5 NN part2
ConvNets 并不一定需要大量数据—— finetuning
Don’t be overly ambitious.
Train NN
Loop:
-
Sample a batch of data
-
Forward prop it through the graph, get loss
-
Backprop to calculate the gradients
-
Update the parameters using the gradient
Training Neural Networks
- One time setup
activation functions, preprocessing, weight initialization, regularization, gradient checking
- Training dynamics
babysitting the learning process, parameter updates, hyperparameter optimization
- Evaluation
model ensembles
Activation functions
Sigmoid funcition
[0,1]
Problem: downside 1. Saturated neurons “kill” the gradients
x 在 -10 ,10之外的时候,好多节点就无法传递BP的gradients了
- Sigmoid outputs are not zero-centered
$ W_i $ Always all positive or all negative
none-zero-centered function converge slower
- exp() is a bit compute expensive
Tanh(x)
[-1,1] zero-centered
Problem: 1. also Saturated
ReLu
2012年的时候才解释==
- Don’t saturate (in +region)
- Very computationally efficient
- Converges much faster than sigmoid/tanh
Problems: 1. not zero-centered output 2. An annoyance: When x<=0 , gradient is killed.问题是,初始化的时候初始化的不好,最后就会有几个Neuron从来没有Updated过。最后就是相当于Dead Neuron,数据从来没经历过这些节点。(常见解决方法(可能不管用):初始化的时候with slightly positive bias eg:0.01)
Leaky ReLU
为了解决ReLU里面的dead Neuron的问题
Will not ‘die’
ELU exponential linear units
2015年10月份的。。。。。[Clevert et al., 2015] 2页paper来证明。。
Maxout
[Goodfellow et al., 2013]
- Does not have the basic form of dot product -> nonlinearity
- Generalizes ReLU and Leaky ReLU
- Linear Regime! Does not saturate! Does not die!
Problem: doubles the number of parameters/neuron :(
Important!!!
- Use ReLU. Be careful with your learning rates
- Try out Leaky ReLU / Maxout / ELU
- Try out tanh but don’t expect much
- Don’t use sigmoid
Data Preprocessing
常用的就是Zero-center,一般不用normalize 或者 PCA或者whitening
Not common to normalize variance, to do PCA or whitening
In practice for Images: center only
- Subtract the mean image (e.g. AlexNet)
- Subtract per-channel mean (e.g. VGGNet)
Weight Initialization
Tiny number的话,最后W会很小
如果超级混乱的init,disaster
(linear activations)合理的Init
“Xavier initialization” [Glorot et al., 2010]
W = np.random.randn(fan_in,fan_out) / np.sqrt(fan_in)
# but when using the ReLU nonlinearity it breaks.Layer std decrease
对于 ReLU
[He et al., 2015] note additional /2
W = np.random.randn(fan_in,fan_out) / np.sqrt(fan_in / 2)论文
Understanding the difficulty of training deep feedforward neural networks by Glorot and Bengio, 2010
Exact solutions to the nonlinear dynamics of learning in deep linear neural networks by Saxe et al, 2013
Random walk initialization for training very deep feedforward networks by Sussillo and Abbott, 2014
Delving deep into rectifiers: Surpassing human-level performance on ImageNet classification by He et al., 2015
Data-dependent Initializations of Convolutional Neural Networks by Krähenbühl et al., 2015
All you need is a good init, Mishkin and Matas, 2015
Batch Normalization
[Ioffe and Szegedy, 2015]
“you want unit gaussian activations? just make them so.”
Usually inserted after Fully Connected(FC) / (or Convolutional, as we’ll see soon) layers, and before nonlinearity.- Improves gradient flow through the network
- Allows higher learning rates
- Reduces the strong dependence on initialization
- Acts as a form of regularization in a funny way, and slightly reduces the need for dropout, maybe
可能有30%的速度衰减
什么时候用BN?
Babysitting the Learning Process
- Preprocess the data
- Choose the architecture
Make sure that you can overfit very small portion of the training data
Learning rate = 1e-6,直接用眼看
cost: NaN almost always means high learning rate…
Hyperparameter Optimization
change range to calc learning rate
Grid Search vs random Search
Always use random search
Loss function
http://lossfunctions.tumblr.com/
big gap = overfitting => increase regularization strength?
no gap => increase model capacity?
Track the ratio of weight updates / weight magnitudes:
ratio between the values and updates: ~ 0.0002 / 0.02 = 0.01 (about okay) want this to be somewhere around 0.001 or so
Important!!
- Regularization (Dropout etc)
- Evaluation (Ensembles etc)
Lecture 6 NN
full saturated or all zeros
- Parameter update schemes
- Learning rate schedules
- Dropout
- Gradient checking
- Model ensembles
Parameter update
SGD is so slow
SGD is a very slow progress along flat direction, jitter along steep one
Momentum update
比SGD快
v = mu * v - learning_rate * dx
X += v解释
- Physical interpretation as ball rolling down the loss function + friction (mu coefficient).
- mu = usually ~0.5, 0.9, or 0.99 (Sometimes a
优势
- Allows a velocity to “build up” along shallow directions
- Velocity becomes damped in steep direction due to quickly changing sign
Nesterov Momentum update (nag)
“lookahead” gradient step (bit different than original)
v_prev = v
v = mu * v - learning_rate * dx
X += -mu * v_prev + (1+mu)*v** Common commercial network!!!!!!!**
AdaGrad update
cache += dx ** 2
x += - learning_rate * dx / (np.sqrt(cache)+1e-7)Added element-wise scaling of the gradient based on the historical sum of squares in each dimension
相当于自动变化Learning Rate
现实中并不是这么好,到最后可能导致lr更大
RMSProp update
[Tieleman and Hinton, 2012]
cache += decay_rate * cache + (1 - decay_rate) * dx ** 2
x += - learning_rate * dx / (np.sqrt(cache)+1e-7)Adam update
合并了RMSProp和Momentum
[Kingma and Ba, 2014]
m,v = #... initialize caches to zeros
for t in xrange(0,big_number):
dx = # evalute gradient
m = beta1*m + (1-beta1)*dx
v = beta2*v + (1-beta2)*(dx**2)
m /= 1 - beta1**t
v /= 1 - beta2**t
x += - learning_rate * m / (np.sqrt(v) + 1e-7)用这个比较多
learning rate as a hyperparameter
- Step decay
- exponential decay
- 1/t decay
Second order optimization methods
使用了 Hessian,Invert the Hessian($O(n^3)$)
- BGFS 把inverse Hessian with rank 1 优化成 $O(n^2)$
- L-BGFS Does not form/store the full inverse Hessian.
L-BGFS
very heavy function. In practice,we don’t use it.
- Usually works very well in full batch, deterministic mode. i.e. if you have a single, deterministic f(x) then L-BFGS will probably work very nicely
- Does not transfer very well to mini-batch setting. Gives bad results. Adapting L-BFGS to large-scale, stochastic setting is an active area of research.
In practice
- Adam is a good default choice in most cases
- If you can afford to do full batch updates then try out L-BFGS (and don’t forget to disable all sources of noise) 一般不用
Evaluation
经验
- Train multiple independent models
- At test time average their results
Enjoy 2% extra performance
??????????????
- can also get a small boost from averaging multiple model checkpoints of a single model.
- keep track of (and use at test time) a running average parameter vector:
Regularization(Dropout)
-
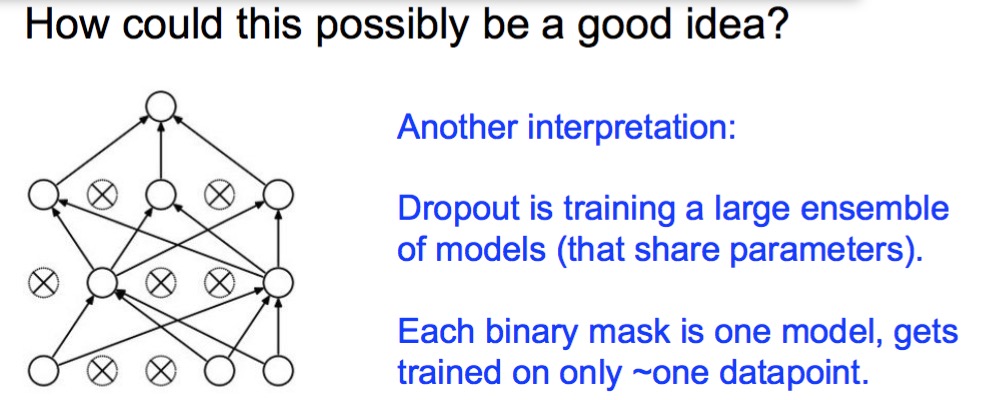
Forces the network to have a redundant representation.
-
Dropout is training a large ensemble of models (that share parameters).
-
Each binary mask is one model, gets trained on only ~one datapoint.
In practice
drop的时候要注意
- Leave all input neurons turned on (no dropout).
- With p=0.5, using all inputs in the forward pass would inflate the activations by 2x from what the network was “used to” during training! => Have to compensate by scaling the activations back down by 1⁄2
???????
ConvNets Face recognize [Taigman et al. 2014]
Deep Neural Networks Rival the Representation of Primate IT Cortex for Core Visual Object Recognition [Cadieu et al., 2014]